RR756是一款SCARA机器人,所有轴都配备有绝对值编码的步进电机。
手臂轴和旋转轴的同步插补使得无需X轴轨道即可实现双口访问。
机器人的X轴轨道可以外部添加,以实现从机器人侧包括示教位置在内的同时控制。
所有轴上都安装了带绝对值编码器的步进伺服电机。
可实现无需X轴轨道的双口访问。
通过增加臂部刚度可以装备更重的末端执行器。
可控制机器人X轴轨道。

RR756是一款SCARA机器人,所有轴都配备有绝对值编码的步进电机。
手臂轴和旋转轴的同步插补使得无需X轴轨道即可实现双口访问。
机器人的X轴轨道可以外部添加,以实现从机器人侧包括示教位置在内的同时控制。
所有轴上都安装了带绝对值编码器的步进伺服电机。
可实现无需X轴轨道的双口访问。
通过增加臂部刚度可以装备更重的末端执行器。
可控制机器人X轴轨道。
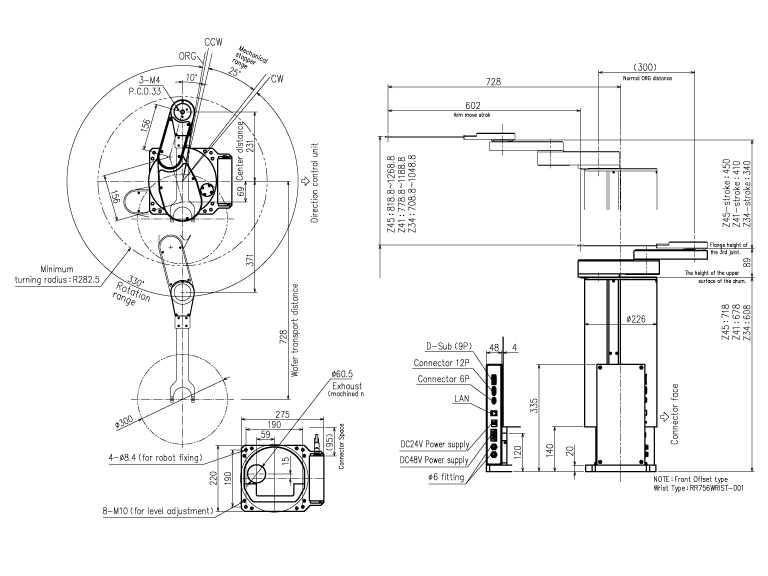
| 手臂/Blade: | 单臂 |
| 臂长(mm): | 156 |
| Z轴行程(mm): | 340/410/450 |
| 最大传输距离(mm)※1: | 728 |
| 旋转范围(deg): | 330 |
| 搬送精度(mm): | ±0.1 |
| 洁净度等级: | ISO class 1 |
| 旋转半径(deg)※2: | R245 ~ R282.5 |
| 编码器规格: | 绝对编码器 |
※1 以搬送300mm Wafer为例
※2 根据Wrist以及finger的长度会有所不同。
