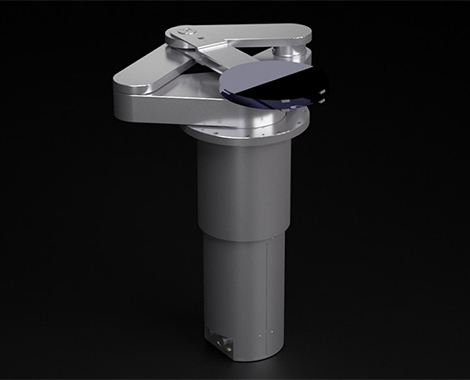
RR481回旋镖式手臂真空机械手(双臂)由于采用了直驱马达,实现了高重复定位精度以及高真空隔绝性能。另外,由于使用钢带的驱动结构,在保证较小的旋转范围的同时,可以使用较长的末端执行器。
较小的旋转范围
可以使用较长的手指,实现较长的伸展距离
可以对应较窄的门阀开口(15mm)
高精度
对应超高真空
高产能
可以选配AWC功能(wafer位置补正)

RR481回旋镖式手臂真空机械手(双臂)由于采用了直驱马达,实现了高重复定位精度以及高真空隔绝性能。另外,由于使用钢带的驱动结构,在保证较小的旋转范围的同时,可以使用较长的末端执行器。
较小的旋转范围
可以使用较长的手指,实现较长的伸展距离
可以对应较窄的门阀开口(15mm)
高精度
对应超高真空
高产能
可以选配AWC功能(wafer位置补正)
| 搬送物: | ~12寸wafer |
| 搬送重量: | 3.0kg/10Nm ※安装手腕的部分(包含EE) |
| Wafer中心搬送距离(300mm Wafer): | 715mm(L200)、835mm(L230)、1115mm(L300) |
| Z轴行程: | 70mm/140mm |
| 旋转范围: | 无死角旋转 |
| 旋转直径: | 530mm(L200) 、590mm(L230) 、730mm(L300) |
| 搬送精度(X,Y): | ±0.1mm |
| 重量: | 100kg |
| 应对真空度: | 10E-6 Pa |
| He Leak rate: | 5x10E-9 Pa.m³/sec He (Base Vacuum 5x10E-4 Pa) |
| 使用温度: | 80℃以下 |
| 真空内部使用材料: | 铝、不锈钢、AM350(波纹管)、镀镍磁铁、氟橡胶O型密封圈 |
| 马达规格: | 真空用直驱马达(Z轴:伺服马达) |
| 编码器规格: | 绝对编码器 |
| 电源输入电压: | DC48V(马达驱动)、DC24V(通信) |
| 通讯规格: | TCP/IP |
| 选配: | 手操器、电源单元(AC200V Input) |
